Informatics Point
Информатика и проектирование
Расчёт регулирующего органа и выбор исполнительного механизма
КР * КОБ = 3;КР = (КР * КОБ)/ КОБ = 3/25 = 0,12;
ТМ/tОБ = 2;ТИ = ТМ/tОБ * tОБ = 2*3 = 6 с;
ТП/tОБ = 0,4;ТП = ТП/tОБ* tОБ = 0,4*3 = 0,12 с.
Результаты, полученные этим образом, аналогичные, т.е. расчет произведен правильно.
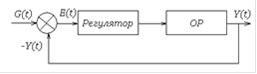
Рисунок 1.9 - Структурная схема САР
Исследование алгоритма управления в замкнутом контуре средствами Matlab 6.5
Для исследования алгоритма управления выберем объект, обладающий характеристиками фильтра низких частот (низкочастотный) и чистым запаздыванием, с дискретной передаточной функцией вида
 , (2.9.5)
, (2.9.5)
где b0=0; b1=0.00462; b2=0.00169; b3=-0.00273;1=-2.48824; a2=2.05387; a3=-0.56203; d=4; K=1; ![]() .
.
Рассчитаем параметры ПИД-регулятора, реализующего алгоритм управления второго порядка с помощью средств MATLAB 6.5. Процесс выбора параметров состоит в следующем:
Переходный процесс объекта при подаче на его вход единичного ступенчатого воздействия показан на рис.2.10. Проведем касательную в точке перегиба кривой переходного процесса и определим значения ![]() ,
,![]() и
и ![]() , а также коэффициент передачи
, а также коэффициент передачи ![]() .
.
Рисунок 1.10 - Переходной процесс объекта
Для расчета коэффициентов передачи К, интегрирования ![]() и дифференцирования
и дифференцирования ![]() воспользуемся правилом настройки, предложенным Такахаши:
воспользуемся правилом настройки, предложенным Такахаши:
![]() (2.9.6)
(2.9.6)
![]() (2.9.7)
(2.9.7)
![]() (2.9.8)
(2.9.8)
В M-file Editor MATLAB 7.0 создадим пользовательскую функцию takahashy(to,k,tu,tg) (рис. 2.10) с аргументами:
to - такт квантования
k - коэффициент усиления
tu,tg - значения, полученные в результат е проведения касательной в точке перегиба кривой переходного процесса, которая возвращает вектор значений:
kp - коэффициент передачи;
tr - коэффициент интегрирования;
td - коэффициент дифференцирования;
alfa - постоянная времени дифференцирования.

Рисунок 1.11 - Пользовательская функция Такахаши
В рабочей области окна MATLAB 7.0 вызов функции осуществляется в соответствии с рис.1.12

Рисунок 1.12 - Вызов функции
Таким образом, при ![]() =6.6_с/25_с=0.264 коэффициенты равны К=3.7985,
=6.6_с/25_с=0.264 коэффициенты равны К=3.7985, ![]() =0.0783,
=0.0783, ![]() =3.2906.
=3.2906.
Построим модель объекта c использованием Simulink в соответствии с рис. 1.13.
Лучшие статьи по информатике
Полевые транзисторы и их применение
Актуальность
темы. Полупроводниковые устройства, такие как диоды, транзисторы и интегральные
схемы используются весьма широко в различных устройствах специа ...
Разработка контура регулирования давления смешанного газа на ГСС блока воздухонагревателей
Главным средством технического процесса, без которого невозможны высокие
темпы дальнейшего роста производительности труда, является комплексная
механизация ...
Технология изготовления электронно-лучевой трубки
Фокусирующая
система может быть линзовой или зеркальной. Линзовые системы имеют сферическую
аберрацию значительно, большую, чем зеркальные, но первые ко ...
Меню сайта
- Главная
- Проектирование современных устройств
- Разработка схем цифровых устройств
- Современные датчики положения
- Современные сетевые технологии
- Современные системы видеонаблюдения
- Телекоммуникационные системы в гостиницах
2026 © www.informaticspoint.ru