Informatics Point
Информатика и проектирование
Расчёт КЧХ объекта в требуемом диапазоне частот
На основании данных таблицы 3 построим годограф КЧХ объекта.
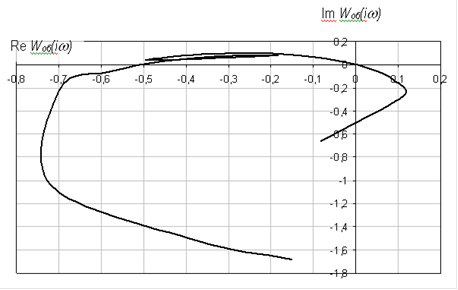
Рис. 2. Фрагмент годографа КЧХ объекта
. Расчёт параметров настройки ПИ и ПИД-регуляторов
Тип автоматического регулятора, обеспечивающего наилучшее качество регулирования, определяется на основе выбора между ПИ и ПИД - регуляторами, получившими наибольшее распространение на практике. При этом на основании данных о динамике управляемого объекта, представленных в таблицах 1а, 1б и 2, осуществляется расчет параметров настройки сначала ПИ, а затем ПИД - регулятора.
Цель расчета заключается в определении таких значений параметров настройки регулятора, при которых обеспечивалось бы выполнение условия
 , (7)
, (7)
и ограничения на запас устойчивости ![]() , где
, где ![]() - предельно допустимое значение величины
- предельно допустимое значение величины ![]() . На практике часто принимают, что
. На практике часто принимают, что![]() .
.
При выполнении указанных расчетов используем метод вспомогательной функции, реализованный на основе компьютерных программ PIREG и PIDREG.
Рассмотрим объект управления, данные о КЧХ которого приведены в таблицах 1а, 1б и 2. Данные полученные по завершении работы программы PIREG сведём в таблицу 4.
ПИ - регулятор
Таблица 4
|
КР |
ТИ |
КР / ТИ |
Резонансная частота WР |
|
0,4940 |
0,6795 |
0,7270 |
2,1871 |
Данные полученные по завершении работы программы PIDREG сведём в таблицу 5.
ПИД - регулятор
Таблица 5
|
КР |
ТИ |
ТД |
КР / ТИ |
Резонансная частота WР |
Частота максимума вспом. функции WF |
|
0,5770 |
0,6607 |
0,0514 |
0,8733 |
2,4219 |
2,4219 |
На основании представленных здесь результатов расчета можно сделать вывод, что для рассматриваемого объекта применение ПИД-регулятора позволяет в несколько раз увеличить отношение ![]() по сравнению со случаями использования ПИ регулятора. На основании выражения
по сравнению со случаями использования ПИ регулятора. На основании выражения  определим значение следующего отношения:
определим значение следующего отношения:
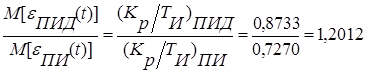 , (8)
, (8)
где ![]() и
и ![]() - значения ошибки управления при использовании ПИ и ПИД-регуляторов. Следовательно, в рассматриваемом случае, как видно из равенства (8), переход от ПИ-регулятора к ПИД-регулятору позволяет уменьшить математическое ожидание ошибки управления более чем в 1,2 раза.
- значения ошибки управления при использовании ПИ и ПИД-регуляторов. Следовательно, в рассматриваемом случае, как видно из равенства (8), переход от ПИ-регулятора к ПИД-регулятору позволяет уменьшить математическое ожидание ошибки управления более чем в 1,2 раза.
Лучшие статьи по информатике
Полевые транзисторы и их применение
Актуальность
темы. Полупроводниковые устройства, такие как диоды, транзисторы и интегральные
схемы используются весьма широко в различных устройствах специа ...
Практическая реализация универсального программно-аппаратного лабораторного комплекса автоматизации измерений
Возрастание
количества измерений, нарастание сложности аппаратуры, повышение требований к
точности, расширение использования математических методов обработк ...
Организация связи на железнодорожном транспорте на примере Свердловской железной дороги
Открытое
акционерное общество «Российские железные дороги» (ОАО «РЖД»)
Филиал
«Свердловская железная дорога»
Свердловский
региональный центр связи (С ...
Меню сайта
- Главная
- Проектирование современных устройств
- Разработка схем цифровых устройств
- Современные датчики положения
- Современные сетевые технологии
- Современные системы видеонаблюдения
- Телекоммуникационные системы в гостиницах
2026 © www.informaticspoint.ru