Informatics Point
Информатика и проектирование
Выбор и разработка функциональной схемы САР электропривода проектируемого механизма
На рисунке 1.16.3.3 представлена нелинейная характеристика регулятора положения, соответствующая таблице 1.16.3.1.
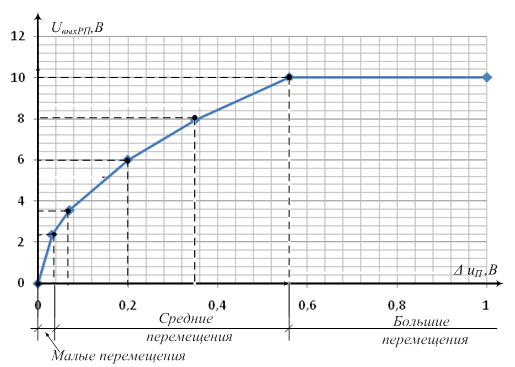
Рисунок 1.16.3.3 - Характеристики регулятора положения
Моделирование системы управления
Моделирование спроектированной и разработанной системы управления в среде MATLAB и приложения Simulink. Используя структурную схему системы управления приводом (СУЭП) на рисунке 1.16.4.2, а также расчёты в пункте 1.16.3 составим модель СУЭП в пакете приложения MATLAB Simulink. По этой же модели рассчитываются переходные процессы на ЭВМ с помощью программы структурного моделирования Simulink. Все коэффициенты, используемые при моделировании, были рассчитаны ранее, поэтому в данном разделе они приводиться не будут.
Структурная схема СПРК также как и приведённая раньше структурная схема включает в себя два канала управления: канал управления положением ротора и канал управления потокосцеплением ротора.
После моделирования произведем снятие необходимых осциллограмм.
Другими словами, перемещения достаточно для достижения скоростью и моментом установившегося значения. Поэтому полученная осциллограмма имеет трапецеидальный характер.
Если говорить о разгоне, то благодаря ЗИ мы имеем равноускоренное и равнозамедленное перемещение НВ, которое задаётся и определяется угловым ускорением привода. Ускорение определяет темп нарастания сигнала, т.е. «крутизну» характеристики, который можно регулировать путём изменения либо постоянной времени интегрирования, либо изменением ограничения релейного элемента. Применяя ПИ-регуляторы (как тока, так и скорости, а также потока) мы выигрываем по быстродействию, но при этом жертвуем весьма значительным перерегулированием. Перед сигналом задания на скорость стоит фильтр, поэтому сигнал по скорости получился практически без перерегулирования, а вот на входе задания тока, такого фильтра нет, соответственно заметно довольно большое перерегулирование по току. Так как система настроена на симметричный оптимум, то величина перерегулирования лежит в пределах 47 %. Но благодаря фильтру на входе ПИ-РС оно не настолько велико и равно
 ; (1.15.4.1)
; (1.15.4.1)
Перемещение слишком мало, чтобы момент и скорость достигли установившегося режима. В связи с этим происходит уменьшения величины перерегулирования, т.е. на весьма малых перемещениях, перерегулированием в контуре тока можно пренебречь.
Лучшие статьи по информатике
Разработка контура регулирования давления смешанного газа на ГСС блока воздухонагревателей
Главным средством технического процесса, без которого невозможны высокие
темпы дальнейшего роста производительности труда, является комплексная
механизация ...
Разработка автоматизированной системы контроля процессов пайки топливных коллекторов
На современном этапе развития промышленности, обеспечение стабильной
работы предприятий по выпуску конкурентоспособной продукции, является задачей
первостеп ...
Разработка устройства для измерения радиационного излучения
Ионизирующее
излучение, часто называемое радиоактивным излучением, ―
это естественное явление, всегда присутствующее в окружающей нас природной
...
Меню сайта
- Главная
- Проектирование современных устройств
- Разработка схем цифровых устройств
- Современные датчики положения
- Современные сетевые технологии
- Современные системы видеонаблюдения
- Телекоммуникационные системы в гостиницах
2026 © www.informaticspoint.ru