Informatics Point
Информатика и проектирование
Выбор и разработка функциональной схемы САР электропривода проектируемого механизма
 (1.16.3.26)
(1.16.3.26)
Зависимость выходного напряжения от входного регулятора положения представляет собой параболу. Из уравнения найдем зависимость коэффициента усиления регулятора положения от величины рассогласования ![]()
 , (1.16.3.27)
, (1.16.3.27)
Зависимость коэффициента усиления нелинейного регулятора положения в функции ![]() в зоне средних перемещений представляет собой гиперболическую зависимость.
в зоне средних перемещений представляет собой гиперболическую зависимость.
Второй участок имеет нелинейную передаточную функцию следующего вида:
![]() , (1.16.3.28)
, (1.16.3.28)
где ![]() - требуемое угловое ускорение, с-2;
- требуемое угловое ускорение, с-2;
![]() - напряжение на входе регулятора перемещения, В.
- напряжение на входе регулятора перемещения, В.
требуемое ускорение электропривода определится следующим образом
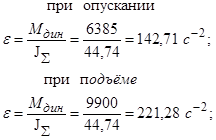 (1.16.3.29)
(1.16.3.29)
Тогда постоянная времени задатчика интенсивности скорости определится по формуле
![]() ; (1.16.2.30)
; (1.16.2.30)
Структурная схема задатчика интенсивности скорости приведена на рисунке 1.16.3.2
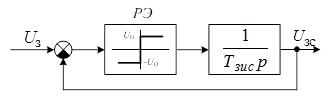
Рисунок 1.16.3.2 - Структурная схема задатчика интенсивности скорости
В режиме больших перемещений в системе регулирования имеют место два ограничения: выход регулятора положения и выход регулятора скорости. Поскольку выход регулятора скорости является заданием на ток, то, ограничивая эту величину, тем самым ограничиваем ток якоря при отработке больших перемещений. Ограничение выхода регулятора положения ограничивает заданную установившуюся скорость при отработке больших перемещений. Следовательно, в этом режиме двигатель будет разгоняться, и тормозиться при постоянном заданном ускорении ![]() , а его скорость не превышает
, а его скорость не превышает ![]() .
.
Регулятор положения находится в режиме ограничения на уровне
![]() ; (1.16.3.31)
; (1.16.3.31)
Коэффициент усиления регулятора положения при больших перемещениях рассчитывается по формуле
 ; (1.16.3.32)
; (1.16.3.32)
Рассчитанное ![]() соответствует оптимальному торможению, при котором система отрабатывает заданное перемещение с
соответствует оптимальному торможению, при котором система отрабатывает заданное перемещение с ![]() за минимальное время с постоянным ускорением.
за минимальное время с постоянным ускорением.
Третий участок ограничивает выход регулятора перемещения на уровне, соответствующем максимальному заданию на скорость.
Учитывая возможный диапазон изменения коэффициентов регулятора положения, задаются начальные значения ![]() с возможностью последующей их корректировки в процессе настройки системы регулирования
с возможностью последующей их корректировки в процессе настройки системы регулирования
![]() ;
; ![]() ;
; ![]() .
.
Определим напряжение рассогласования, при котором линейный участок характеристики переходит в параболическую её часть:
![]() ; (1.16.3.33)
; (1.16.3.33)
 (1.16.3.34)
(1.16.3.34)
Определим напряжение рассогласования, при котором регулятор положения заходит в насыщение:
![]() ,
,
![]() (1.16.3.35)
(1.16.3.35)
Результаты расчета характеристики регулятора положения приведены в таблице 1.16.3.1 (в силу симметричности характеристики расчет проведен только для положительных значениях ![]() ). На рисунке 1.16.3.3 приведена зависимость
). На рисунке 1.16.3.3 приведена зависимость
 ; (1.16.3.36)
; (1.16.3.36)
![]() (1.16.3.37)
(1.16.3.37)
Таблица 1.16.3.1 - Характеристики регулятора положения
|
Uзс, В |
0 |
0,031 |
0,07 |
0,2 |
0,35 |
0,56 |
1 |
|
ΔUп, В |
0 |
2,36 |
3,55 |
6 |
7,94 |
10 |
10 |
Лучшие статьи по информатике
Система сигнализации
Система
сигнализации № 7 - это универсальная многофункциональная система межстанционной
сигнализации, ориентированная на поддержку практически всех уже изве ...
Проектирование светодиодного табло на микроконтроллере PIC16C84
светодиодный надежность
Развитие
микроэлектроники и широкое применение ее изделий в промышленном производстве, в
устройствах и системах управления самыми раз ...
Частотно-территориальное планирование сети сотовой подвижной связи стандарта GSM
Линии радиосвязи, входящие в состав сотовых сухопутных подвижных систем
электросвязи (ССПСЭ) и спутниковых систем связи, обычно работают в диапазонах
ультра ...
Меню сайта
- Главная
- Проектирование современных устройств
- Разработка схем цифровых устройств
- Современные датчики положения
- Современные сетевые технологии
- Современные системы видеонаблюдения
- Телекоммуникационные системы в гостиницах
2026 © www.informaticspoint.ru