Informatics Point
Информатика и проектирование
Выбор и разработка функциональной схемы САР электропривода проектируемого механизма
Регулятор положения выполнен нелинейным (НРП) и имеет параболическую структуру, состоящую из трёх участков. Кроме того в регуляторе положения предусмотрена электрическая синхронизация правого (ПНВ) и левого (ЛНВ) нажимных винтов. Этого достигается введением дополнительного регулятора перекоса нажимных винтов. Каждый винт обладает своим индивидуальным НРП, а регулятор перекоса является общим. Задание на положение на каждый НВ берётся как полу-сумма заданий на положения ЛНВ и ПНВ, для того чтобы поддержать постоянство, т.е. неизменность сигнала задания (за счёт его среднеарифметического значения). Такая полу-сумма подаётся на вход каждого РНВ (РПНВ и РЛВН). Если в системе отсутствует реальный перекос, т.е. разность между фактическими значениями положения обоих винтов, то при необходимости (различные технологические задачи) можно создать искусственный перекос - подав на 2-ой сумматор регулятора перекоса сигнал «дополнительного задания на перекос». Сигнал с выхода регулятора перекоса подаётся на соответствующие сумматоры РПНВ и РЛНВ (т.е. одно и то же значение), но разной полярности. Т.е. уменьшая или увеличивая сигнал задания на перемещение того или иного НВ, т.о. обеспечивается синхронизация НВ. С выходов НРП сигнал поступает на РС, выступая заданием на скорость. И внешний, и внутренний регуляторы скорости и тока соответственно выполнены на базе функциональных блоков с помощью ряда программируемых параметров. Структурная схема таких блоков приведена на рисунке 1.17.3.1, а основные параметры приводятся дальше в таблице 1.17.3.1-5. Особенностью РС является тот факт, что ослабление поля возможно лишь при скалярном управлении в разомкнутой системе управления.
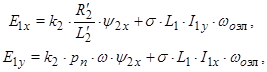
На предложенной же структурной схеме имеется большое количество перекрёстных связей, которые с одной стороны довольно сильно усложняют схему за счёт увеличения дополнительных математических вычислений и увеличения вероятности появления неточностей и погрешностей в вычислениях, к тому же усложняет процесс программное моделирования системы управления. С другой стороны, внутренние связи образуют так называемый контур формирования ЭДС, наводимой в статоре:
 (1.16.2.4)
(1.16.2.4)
где  ЭДС самоиндукции цепи статора (или падения напряжения на индуктивном сопротивлении статора), а
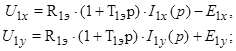
ЭДС самоиндукции цепи статора (или падения напряжения на индуктивном сопротивлении статора), а ![]() ЭДС вращения, наводимая в статоре потокосцеплением ротора. С учётом этого напряжение на статоре будет описываться следующими выражениями:
ЭДС вращения, наводимая в статоре потокосцеплением ротора. С учётом этого напряжение на статоре будет описываться следующими выражениями:
 (1.16.2.5)
(1.16.2.5)
Поэтому стремятся исключить влияние контура ЭДС, с тем, чтобы приблизить выше приведённые уравнения к приводам постоянного тока. Что облегчает структуру построения системы управления.
Расчет параметров объекта регулирования
На рисунке 1.16.3.1 представлена упрощенная структурная схема объекта регулирования, далее приведен расчет основных его параметров.
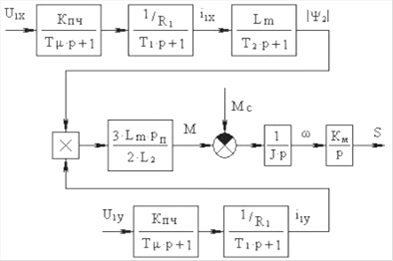
Рисунок 1.16.3.1 - Структурная схема объекта регулирования
Индуктивность рассеяния статорной обмотки двигателя
![]() мГн, (1.16.3.1)
мГн, (1.16.3.1)
где ![]() - индуктивное сопротивление рассеяния фазы статора, Ом;
- индуктивное сопротивление рассеяния фазы статора, Ом;
![]() с-1 - угловая скорость холостого хода;
с-1 - угловая скорость холостого хода;
![]() - номинальная частота напряжения питания двигателя, Гц;
- номинальная частота напряжения питания двигателя, Гц;
![]() - число пар полюсов АД.
- число пар полюсов АД.
Полная индуктивность обмотки статора
![]() мГн; (1.16.3.2)
мГн; (1.16.3.2)
Индуктивность рассеяния роторной обмотки двигателя
![]() мГн; (1.16.3.3)
мГн; (1.16.3.3)
где ![]() - индуктивное сопротивление рассеяния фазы ротора, Ом.
- индуктивное сопротивление рассеяния фазы ротора, Ом.
Полная индуктивность обмотки ротора
![]() мГн; (1.16.3.4)
мГн; (1.16.3.4)
Коэффициент электромагнитной связи ротора
![]() ; (1.16.3.5)
; (1.16.3.5)
Электромагнитная постоянная времени статорной цепи
![]() с; (1.16.3.6)
с; (1.16.3.6)
где ![]() мГн.
мГн.
Электромагнитная постоянная времени роторной цепи
![]() с; (1.16.3.7)
с; (1.16.3.7)
Динамические свойства преобразователя частоты с блоками измерения и преобразования координат могут быть упрощенно представлены передаточной функцией инерционного звена.
Лучшие статьи по информатике
Расчет спутниковой передающей антенны
Требуется спроектировать и рассчитать антенну,
в соответствии с приведёнными ниже техническими данными.
Назначение:
Бортовая спутниковая передающая ант ...
Разработка технологического процесса сборки и монтажа усилителя тока
В
настоящее время, когда развивающаяся рыночная экономика заставляет предприятия
специализирующиеся на выпуске радиоэлектронной аппаратуры (РЭА) работать в
...
Проектирование цифровой системы коммутации на базе оборудования Surpass hiE 9200
В настоящее время многие операторы связи обладают развитой
инфраструктурой, построенной во время становления телекоммуникационной отрасли
в России. Инфрастр ...
Меню сайта
- Главная
- Проектирование современных устройств
- Разработка схем цифровых устройств
- Современные датчики положения
- Современные сетевые технологии
- Современные системы видеонаблюдения
- Телекоммуникационные системы в гостиницах
2026 © www.informaticspoint.ru