Informatics Point
Информатика и проектирование
Выбор компонентов САУ
Рис.3.3.6. Радиально-поршневой насос
Энкодер. Для измерения угловой скорости сгибания кистевого сустава используем абсолютный энкодер серии AMG 81.

Рис.3.3.7. Абсолютный энкодер серии AMG 81.
Абсолютные датчики вращения и датчики угла определяют текущую координату без необходимости перемещения осей. На выходе у абсолютных энкодеров генерируется цифровой код уникальный для каждого положения вала.
Таблица 2. Параметры абсолютного энкодера серии AMG 81
|
Однооборотный (= точность в пределах одного оборота): |
13 бит (= 8192) |
|
Многооборотный (= количество оборотов вала): |
16 бит (= 65536) |
|
Логический код (для контроля скорости): |
Логический код (для контроля скорости): |
|
Количество импульсов на оборот: |
2048 |
|
Maксимальная выходная частота: |
120 кГц |
|
Присоединение: |
12 пиновый коннектор |
|
Допустимая рабочая температура: |
От -20 °C до +85 °C |
|
Ударопрочность (6мс): |
1000 м/с2 |
|
Вес: |
от 1.0 до 1.5 кг |
Датчик положения. Для предотвращения травм у пациентов, на реабилитационное устройство установлены концевые датчики положения.

Рис.3.3.8.Концевой датчик положения
Бесконтактные датчики положения магнитного типа широко применяются в пневмо и гидроцилиндрах. В системах управления они, как правило, выполняют функции датчиков обратной связи, сигнализируя о завершении выполнения конкретным элементом оборудования команды на перемещение.
Измерительный блок. Измерительный блок состоит из тензомостов, инструментальных усилителей и источника опорного напряжения. Из схемы видно, что в тензомостах установлено два тензорезистора. Это сделано для увеличения чувствительности схемы и для линеаризации выходной характеристики. Для тензодатчиков использовались тензорезисторы с сопротивлением принулевой деформации 400 Ом, тензокоэффициентом 2,1, базовой длиной 5 мм. Максимальная деформация составляет 0,003 от номинальной длины. Для определения коэффициента усиления измерительного усилителя рассчитаем напряжение на выходе тензомоста при максимальной деформации и опорном напряжении 5 В.
![]()
![]()
![]()
![]() ,
,
тензокоэффициент,- базовая длина,- сопротивление при нулевой деформации,
Δl - абсолютное удлинение (деформация),
ΔR - изменение сопротивления вследствие деформации Δl,
Uоп - напряжение питания моста (5 В).
Подставив в формулы параметры выбранного сопротивления, получим, что при максимальной деформации:
ΔR = 2,4 Ом,
ΔU = 15 мВ.
Чтобы не допустить насыщение на выходе измерительного усилителя, зададим максимальный размах:вых = 3В.вх = 2ΔU = 30 мВ.= 100.

Рис.3.3.9. Тензодатчик
В настоящее время на рынке существует достаточное количество качественных инструментальных усилителей известных мировых производителей. В нашем случае удобно применить инструментальный усилитель с фиксированным коэффициентом усиления, однополярным питанием, размахом выходного напряжения во всем диапазоне питания
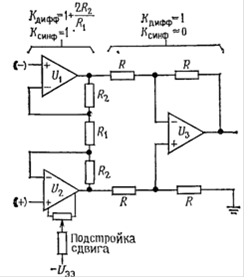
Рисунок 3.3.10. Внутренняя структура инструментального усилителя
Так как выходное напряжение тензомоста может быть разнополярным в зависимости от направления приложения нагрузки, то для нормального сопряжения с входами АЦП микроконтроллера и увеличения динамического усиления измерительной схемы необходимо задать смещение выходного сигнала. Эту функцию выполняет источник опорного напряжения, реализованный на операционном усилителе MAX4335. Такой подход обусловлен тем, что выходное сопротивление источников опорного напряжения желательно делать как можно более низким для исключения влияния изменения потенциалов внутри измерительных схем на значение опорного напряжения. Назначение резисторов во входных цепях инструментальных усилителей - ограничить втекающие - вытекающие токи через встроенные защитные диоды, предназначенные для защиты от потенциального пробоя. Выходные интеграторы (RC цепь) дополнительно снижают пульсации на входах в АЦП.
Лучшие статьи по информатике
Организация связи на железнодорожном транспорте на примере Свердловской железной дороги
Открытое
акционерное общество «Российские железные дороги» (ОАО «РЖД»)
Филиал
«Свердловская железная дорога»
Свердловский
региональный центр связи (С ...
Построение и анализ математической модели объекта управления
Построим математическую модель объекта управления в пространстве
состояния
Рисунок 2 Структурная схема ОУ
В схеме четыре элемента, запасающих э ...
Разработка управляющей программы для микроконтроллера HCS12
Около
55% проданных в мире процессоров приходится на 8ми битные микроконтроллеры.
Более 4 млрд. 8ми битных микроконтроллеров продано в 2006. Они установлены ...
Меню сайта
- Главная
- Проектирование современных устройств
- Разработка схем цифровых устройств
- Современные датчики положения
- Современные сетевые технологии
- Современные системы видеонаблюдения
- Телекоммуникационные системы в гостиницах
2026 © www.informaticspoint.ru