Informatics Point
Информатика и проектирование
Выбор компонентов САУ
Для управления и обработки сигналов устройств САУ выбираем микроконтроллер фирмы Atmel, марки АTmega64, так как он имеет ряд особенностей, которые были учтены при проектировании данной системы управления.- экономичный 8 битовый КМОП микроконтроллер, построенный с использованием расширенной RISC архитектуры AVR т.е. архитектуры “с сокращенным набором команд” в отличии от CISC архитектуры, обозначающего контроллер со сложным набором команд, что не нужно для данной системы управления. Устройство имеет 2 кбайта EEPROM (Electrically Erasable Programmable Read Only Memory) т.е.ПЗУ с электрическим стиранием, что позволяет перепрограммировать контроллер не выпаивая из платы. Исполняя по одной команде за период тактовой частоты, Atmega64 имеет производительность около 16 MIPS на 16МГц (Million Instructions Per Second), т.е. миллион команд в секунду, что позволяет создать систему оптимальной по скорости и потребляемой мощности, а это важно, т.к. изменение параметров системы происходит динамически и с большой частотой.
В основе ядра AVR лежит RISC архитектура, объединяющая развитый набор команд и 32 8-разрядных рабочих регистра общего назначения. Все 32 регистра непосредственно подключены к арифметико-логическому устройству (АЛУ), что дает доступ к любым двум регистрам за один машинный цикл.
Подобная архитектура эффективно поддерживает языки высокого уровня и дает высокую плотность ассемблерных программ. Atmega64 предлагает следующие возможности:
· 64кБ загружаемой Flash памяти;
· 2кБ EEPROM;
· 53 двунаправленные линии ввода/вывода;
· 8 ШИМ-каналов;
· Рабочее напряжение 4,5 - 5,5 В;
· Рабочая частота 0 - 16 МГц.
Так же важно для данной системы соотношение "цена - производительность - энергопотребление", что обеспечивает выбранный контроллер. Управляющим элементом электрической схемы является микроконтроллер ATmega64. Тактовая частота контроллера (16 МГц) задается кварцевым резонатором Q1. Начальное программирование осуществляется через разъем X1, выводы PE0, PE1 (RXD, TXD) и SCK, что является особенностью контроллеров серии 64-128 (все другие контроллеры mega программируются через последовательный интерфейс SPI - выводы MISO, MOSI).

Рис.3.3.1. Внешний вид микроконтроллера Atmega64.

Рис.3.3.2. Микроконтроллер Atmega64.
Драйверная микросхема. В качестве усилителя мощности будем использовать драйверную микросхему IR2113, выпускаемую фирмой «International Rectifier». Драйвер представляет собой микросхему в стандартном корпусе. Входным сигналом служит сигнал микросхемы управления стандартной амплитуды логического уровня. На выходе драйвера имеются напряжения управления «верхним» и «нижним» силовыми транзисторами. В драйвере приняты меры по обеспечению необходимых управляющих уровней, создан эквивалент гальванической развязки, имеются дополнительные функции: вход отключения, защита от пониженного напряжения питания, фильтр коротких управляющих импульсов. Конденсаторы Сl и С9 фильтрующие (все пояснения даны для одного канала управления), конденсатор С7 и диод VD1 - бyстрепный каскад, обеспечивающий питание каскада, управляющего верхним ключом. Резисторы Rl0 и R13 - затворные. Затворные резисторы также «спасают» драйвер от защелкивания. Конденсатор С16 - фильтр в силовой цепи.
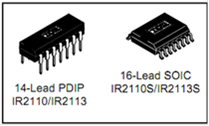
Рис.3.3.3. Внешний вид драйверных микросхем IR2113.
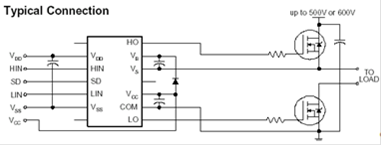
Рис.3.3.4. Драйверная микросхема IR2113.
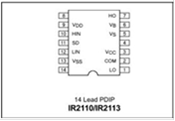
Рис.3.3.5. Драйверная микросхема IR2113.
Гидронасос. Исходя из полученного расчетного значения рабочего объема и необходимой скорости подачи, а так же учитывая требования мобильности насоса выбираем радиально-поршневой насос с постоянным рабочим объемом. Его прочность, долгий срок службы ,низкая стоимость и простота обслуживания являются основными особенностями. Наиболее хорошие гидравлические, механические и объемные КПД, а так же низкий уровень шума у насосов фирмы Rexroth, не менее важным критерием является низкое отношение веса к мощности.
Из предложенного ряда насосов выбираем насос PR4WA01M01 c рабочим объёмом ![]()
![]() .
.

Лучшие статьи по информатике
Проектирования мультисервисной сети
В
данном курсовом проекте рассматривается проблема проектирования мультисервисной
сети предприятия “Магазин”. Термин мультисервисная сеть означает, что в да ...
Разработка принципиальной схемы 16 разрядного счетчика с использованием программы Electron ics Workbench 5.12
Подсчет импульсов является одной из наиболее распространенных операций,
выполняемых в устройствах дискретной обработки информации. Такая операция в
циф ...
Разработка плана реконструкции с заменой аналоговой АТС на цифровую АТС Алмаз-1
В последние годы на телефонных сетях Российской Федерации внедряются
новые системы АТС и узлы коммутации, которые обеспечивают качественную и
надежную связь ...
Меню сайта
- Главная
- Проектирование современных устройств
- Разработка схем цифровых устройств
- Современные датчики положения
- Современные сетевые технологии
- Современные системы видеонаблюдения
- Телекоммуникационные системы в гостиницах
2026 © www.informaticspoint.ru