Informatics Point
Информатика и проектирование
Оценка точности установившегося режима в зависимости от порядка астатизма систем управления
для статических систем (![]() )
)
![]() ,
, ![]() ,
, ![]() ;
;
для астатических систем первого порядка (![]() ,
, ![]() )
)
![]() ,
, ![]() ,
, ![]() ;
;
для астатических систем второго порядка (![]() ,
, ![]() )
)
![]() ,
, ![]() ,
, ![]() .
.
Возможные случаи изменения ошибок иллюстрируются рис. 5.2.
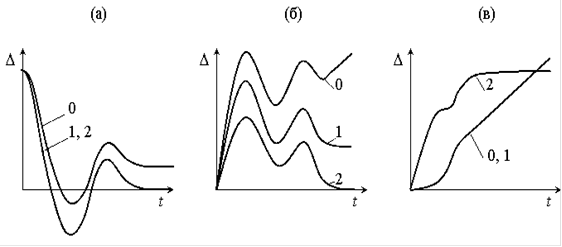
Рис. 5.2. Графики ошибок при ступенчатом (а), линейном (б) и квадратичном (в) воздействиях: 0 - нулевой астатизм; 1 - астатизм первого порядка; 2 - астатизм второго порядка
Для определения значения расходящейся ошибки в любой момент времени из интервала (![]() ) передаточную функцию по ошибке представим в виде ряда
) передаточную функцию по ошибке представим в виде ряда ![]() , что позволяет определить ошибку в следующем виде:
, что позволяет определить ошибку в следующем виде:
![]() (5.3)
(5.3)
При этом коэффициенты разложения ![]() определяются, исходя из выражения для передаточной функции по ошибке
определяются, исходя из выражения для передаточной функции по ошибке
 (5.4)
(5.4)
или рекуррентной формулой через коэффициенты передаточной функции разомкнутой системы
![]() , (5.5)
, (5.5)
где ![]() - порядок астатизма.
- порядок астатизма.
Динамическая ошибка при гармоническом воздействии ![]() , где
, где ![]() - частота качки, изменяется по закону воздействия, т.е. имеет периодический характер. Поэтому при оценке качества процессов управления в установившемся гармоническом режиме достаточно оценить амплитудное значение искомой динамической ошибки. Это наиболее просто осуществляется по частотным характеристикам исследуемой САУ, исходя из выражения
- частота качки, изменяется по закону воздействия, т.е. имеет периодический характер. Поэтому при оценке качества процессов управления в установившемся гармоническом режиме достаточно оценить амплитудное значение искомой динамической ошибки. Это наиболее просто осуществляется по частотным характеристикам исследуемой САУ, исходя из выражения
![]() , (5.6)
, (5.6)
где ![]() - модуль передаточной функции разомкнутой системы на частоте
- модуль передаточной функции разомкнутой системы на частоте ![]() ,
, ![]() - период качки.
- период качки.
Очевидно, что ![]() определяется либо аналитически, либо из ЛАХ разомкнутой системы.
определяется либо аналитически, либо из ЛАХ разомкнутой системы.
Лучшие статьи по информатике
Разработка системы управления электроприводом нажимного устройства реверсивного четырехвалкового стана 5000 горячей прокатки
Целью проекта является разработка системы управления электроприводом
нажимного устройства реверсивного четырехвалкового стана «5000» горячей
прокатки.
По ...
Проектирование канала сбора аналоговых данных микропроцессорной системы
Применяя микропроцессоры и микро-ЭВМ для контроля за сложными
производственными процессами, можно обрабатывать в реальном масштабе времени
сигналы, поступаю ...
Обзор программных средств локальных сетей
С
распространением ЭВМ нетрудно предсказать рост в потребности передачи данных.
Некоторые приложения, которые нуждаются в системах связи, могу ...
Меню сайта
- Главная
- Проектирование современных устройств
- Разработка схем цифровых устройств
- Современные датчики положения
- Современные сетевые технологии
- Современные системы видеонаблюдения
- Телекоммуникационные системы в гостиницах
2026 © www.informaticspoint.ru