Informatics Point
Информатика и проектирование
Расчёт нагрузочной диаграммы двигателя
Теперь мы обладаем всеми данными, чтобы построить тахограмму и соответствующую ей нагрузочную диаграмму:
Проверка предварительно выбранного электродвигателя по условию нагрева и перегрузки
Метод определения потерь по эквивалентному моменту уступает в погрешности тому же методу, но по эквивалентному току. Поэтому воспользуемся методом определения потерь по эквивалентному току, чтобы произвести проверку производим для выбранного двигателя по условию нагрева за весь цикл работы. Эффективный ток статора за время работы двигателя определяется по формуле
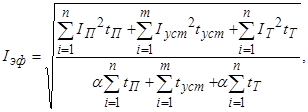 (1.6.11)
(1.6.11)
где ![]() - значение тока статора при пуске на каждом отдельном участке, А;
- значение тока статора при пуске на каждом отдельном участке, А;
![]() - время пуска двигателя на каждом участке, с;
- время пуска двигателя на каждом участке, с;
![]() - значение тока статора при установившемся движении на каждом участке, А;
- значение тока статора при установившемся движении на каждом участке, А;
![]() - время установившегося движения на каждом участке, с;
- время установившегося движения на каждом участке, с;
![]() - значение тока статора при торможении на каждом участке, А;
- значение тока статора при торможении на каждом участке, А;
![]() - время торможения двигателя на каждом участке, с;
- время торможения двигателя на каждом участке, с;
![]() - количество участков пуска/торможения;
- количество участков пуска/торможения;
![]() - количество участков установившегося движения;
- количество участков установившегося движения;
a - коэффициент, учитывающий ухудшение охлаждения двигателя при работе со скоростями ниже номинальной, принимается равным 1, так как принудительное охлаждение.
Значение тока статора в зависимости от момента и скольжения двигателя определяется по формуле:
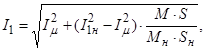 (1.6.12)
(1.6.12)
где ![]() ток намагничивания двигателя, А;
ток намагничивания двигателя, А;
![]() - номинальный ток статора, А;
- номинальный ток статора, А;
![]() - момент двигателя, Нм, соответствующий искомому току статора;
- момент двигателя, Нм, соответствующий искомому току статора;
![]() - скольжение двигателя, соответствующее данному режиму работы;
- скольжение двигателя, соответствующее данному режиму работы;
![]() - номинальный момент двигателя, Нм;
- номинальный момент двигателя, Нм;
![]() - номинальное скольжение.
- номинальное скольжение.
Чтобы найти ток статора, необходимо определить скольжение двигателя для каждого участка нагрузочной диаграммы (рисунок 1.3). Поскольку разгон, установившееся движение и торможение двигателя происходят при постоянных моментах, то скольжение и ток статора будут постоянными в пределах каждого участка нагрузочной диаграммы. Скольжение определим, воспользовавшись формулой Клосса:
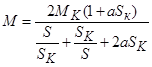 (1.6.13)
(1.6.13)
где ![]() .
.
Выразив из формулы скольжение S, получим
 , (1.6.14)
, (1.6.14)
Т.о.
 (1.6.15)
(1.6.15)
где М - значение момента двигателя, Нм, соответствующее искомому скольжению. Результаты расчета приведены в таблице 1.6.2
Таблица 1.6.2 - Расчет тока статора и скольжения
|
Проход |
Примечание |
Момент, кНм |
S |
Ток, А |
Проход |
Примечание |
S |
Ток, А |
Момент, кНм |
|
1-5 |
Мр |
14,325 |
0,0214 |
1012,55 |
12 |
Мр=Мт |
0,006942 |
311,911 |
1,369 |
|
Муст |
7,94 |
0,0122 |
557,624 |
13 |
Мр=Мт |
0,006836 |
308,565 |
1,293 | |
|
Мт |
6,385 |
0,0133 |
612,42 |
14 |
Мр=Мт |
0,00672 |
303,927 |
1,18 | |
|
6 |
Мр=Мт |
1,78 |
0,0073 |
329,18 |
15 |
Мр=Мт |
0,006625 |
300,264 |
1,09 |
|
7 |
Мр=Мт |
1,66 |
0,0072 |
324,1 |
16 |
Мр=Мт |
0 |
0 |
0 |
|
8 |
Мр=Мт |
1,53 |
0,00708 |
318,496 |
17 |
Мр=Мт |
0 |
0 |
0 |
|
9 |
Мр=Мт |
1,55 |
0,0071 |
319,341 |
18 |
Мр |
0,02102 |
994,6228128 |
14,036 |
|
10 |
Мр=Мт |
1,42 |
0,006965 |
313,842 |
Муст |
0,0098 |
440,5 |
4,13 | |
|
11 |
Мр=Мт |
1,4 |
0,00695 |
313,043 |
Мт |
0,0161 |
752,013 |
9,9 |
Лучшие статьи по информатике
Система охранно-пожарной сигнализации ООО Завод Медсинтез
охранный сигнализация пожарный
Пожарная безопасность предусматривает обеспечение
безопасности людей и сохранения материальных ценностей предприятия н ...
Полевой транзистор с изолированным затвором
Полевыми транзисторами называют активные
полупроводниковые приборы, в которых выходным током управляют с помощью
электрического поля. Полевые транзисто ...
Технология создания первичной фонограммы в условиях записи чистового звука к видеофильму формата DVCAM с использованием PC для записи звука на съемочной площадке
Главные цели, поставленные автором для данной курсовой работы - показать
работу звукорежиссера в условиях съемки видеофильма формата DVCAM с использованием п ...
Меню сайта
- Главная
- Проектирование современных устройств
- Разработка схем цифровых устройств
- Современные датчики положения
- Современные сетевые технологии
- Современные системы видеонаблюдения
- Телекоммуникационные системы в гостиницах
2026 © www.informaticspoint.ru