Informatics Point
Информатика и проектирование
Энергосберегающие технологии
Доказано, что
![]() ,
,
где ![]() - свободный член характеристического уравнения замкнутой системы.
- свободный член характеристического уравнения замкнутой системы.
Условия устойчивости (робастности) для замкнутых систем управления с пи регуляторами
Функциональная схема системы управления c обратной связью:
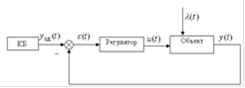
КБ - командный блок, вырабатывающий сигнал задания ![]() ;
; ![]() - сигнал ошибки управления;
- сигнал ошибки управления; ![]() - управляющее воздействие на объект;
- управляющее воздействие на объект; ![]() - выходной сигнал объекта (управляемая величина);
- выходной сигнал объекта (управляемая величина); ![]() - возмущающее воздействие.
- возмущающее воздействие.
Сигнал ошибки управления определяется по формуле
![]() . (1)
. (1)
Передаточная функция ПИ регулятора:
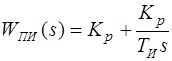 , (2)
, (2)
где ![]() - коэффициент передачи, а
- коэффициент передачи, а ![]() - постоянная времени интегрирования;
- постоянная времени интегрирования; ![]() - комплексная переменная.
- комплексная переменная.
Динамические характеристики системы управления температурой в варочных колоннах
Идентификация объекта управления по кривой разгона:
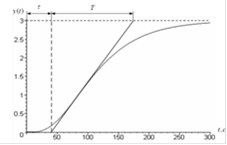
Передаточная функция объекта управления ![]() задается выражением
задается выражением
![]() , (3)
, (3)
где ![]() - коэффициент передачи объекта;
- коэффициент передачи объекта; ![]() и
и ![]() - постоянные времени объекта и транспортного запаздывания;
- постоянные времени объекта и транспортного запаздывания; ![]() - комплексная переменная.
- комплексная переменная.
По кривой разгона установлено, что параметры передаточной функции объекта (2) принимают следующие значения:
![]() ;
; ![]() ;
; ![]() . (4)
. (4)
Амплитудно-частотная характеристика (АЧХ) замкнутой системы по каналу ![]()
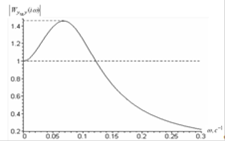
Из графика АЧХ по каналу ![]() следует, что
следует, что![]() , (6)
, (6)
где ![]() - показатель колебательности замкнутой системы.
- показатель колебательности замкнутой системы.
Амплитудно-частотная характеристика (АЧХ) замкнутой системы
по каналу ![]()
Лучшие статьи по информатике
Оптрон гальванической развязки
Основное преимущество обратноходовой топологии - дешевизна и
малое количество компонентов. Поэтому практически все сетевые источники питания
до мощностей 30 ...
Схемотехника параметрических, линейных и импульсных стабилизаторов напряжения постоянного тока
Для выполнения курсовой работы были выбраны две схемы источников
вторичного электропитания с линейным и импульсным регулированием.
Импульсное регулировани ...
Технология TriplePlay
Сегодня
во множестве источников можно узнать, что мировая телекоммуникационная отрасль
находится в состоянии грандиозной реконструкции, связанной с конверге ...
Меню сайта
- Главная
- Проектирование современных устройств
- Разработка схем цифровых устройств
- Современные датчики положения
- Современные сетевые технологии
- Современные системы видеонаблюдения
- Телекоммуникационные системы в гостиницах
2026 © www.informaticspoint.ru