Informatics Point
Информатика и проектирование
Цифровая система управления
На рисунке 3.1.1. представлена функциональная схема цифровой системы автоматического управления.
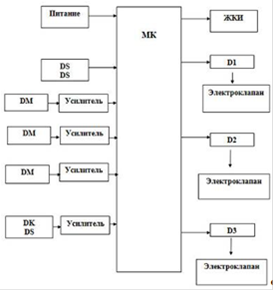
Рис.3.1.1. Функциональная схема цифровой системы автоматического управления
На функциональной схеме приняты следующие обозначения:
· Питание -питания установки;
· МК - микроконтроллер, включающий АЦП и ШИМ на кристалле. Микроконтроллер обеспечивает реализацию необходимых законов управления, а также управляет индикацией и обрабатывает.
· ЖКИ - жидкокристаллический дисплей с встроенным контроллером, после включения кнопки START отображает значения измеряемой величины.
· DS- цифровой датчик, регистрирующий угловую скорость сгибания сустава.
· DK-концевой датчик регулирующий конечное положение сгибания сустава.
· DM - тензодатчик, регистрирующий усилия.
· Усилитель - усиливает сигнал с тензодатчиков.
· D1 - драйвер, осуществляют силовую развязку цифровой системы управления и электроклапана.
· D2 - драйвер, осуществляют силовую развязку цифровой системы управления и электроклапана.
· D3 - драйвер, осуществляют силовую развязку цифровой системы управления и электроклапана
Структурно электрическая схема состоит из четырех групп:
· управляющий контроллер;
· сенсорная система устройства, включающая в себя абсолютные энкодеры, тензодатчики, концевые датчики;
· силовая часть управления Электроклапанами;
· источник питания.
Устройство имеет три электроклапана с одинаковым принципом управления и конструкцией. Системы управления электроклапанами аналогичны, следовательно, можно рассматривать любой из них. На рис.4.1. приведена структурная схема системы автоматического управления.
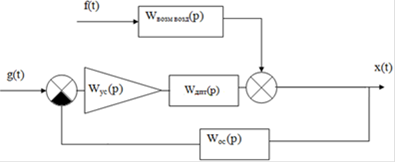
Рис.3.1.2. Структурная схема управленияус (p) - передаточная функция усилителя;дпт.(p) - передаточная функция двигателя;ос (p) - передаточная функция обратной связи;возм возд(p) - передаточная функция возмущающего воздействия;
Управление осуществляется путем поддержания постоянного момента.
Пациент прикладывает усилие к устройству. Усилие измеряется с помощью тензодатчиков и зависит в свою очередь от приложенного к устройству - момента, создаваемого пациентом и момента сопротивления, создаваемого устройством. Затем происходит открытие электроклапана и начинается подача рабочий жидкости в гидроцилиндр с помощью насоса.При полностью открытом электроклапане гидросистема обеспечивает максимальное усилие. Второй электроклапан обеспечивает вывод рабочий жидкости из гидросистемы.
Определение передаточных функций
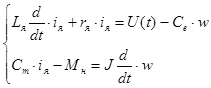
Так как при фиксированном возбуждении двигатель имеет две степени свободы, то необходимо иметь для него два исходных дифференциальных уравнения. Первое уравнение может быть получено, если записать второй закон Кирхгофа для цепи якоря; второе же представляет собой закон равновесия моментов на валу двигателя [2].
Таким образом, работу привода можно описать следующими уравнениями:
 (14)
(14)
В этих уравнениях ![]() и
и ![]() - индуктивность и сопротивление цепи якоря;
- индуктивность и сопротивление цепи якоря;
![]() и
и ![]() (15)
(15)
Лучшие статьи по информатике
Ремонт и диагностика смартфонов HTC
Смартфон
(англ. smartphone - умный телефон) - мобильный телефон, дополненный
функциональностью карманного персонального компьютера.
Смартфоны
отличаются от ...
Сенсорный выключатель
Целью данного курсового проекта является разработка, выбор и
обоснование конструкции, технологического процесса сборки Сенсорного
выключателя. Для обоснован ...
Теория автоматического управления. Линейные системы
Настоящие методические указания служат пособием для студентов института,
выполняющих лабораторные и курсовые работы по теории линейных систем
автоматическог ...
Меню сайта
- Главная
- Проектирование современных устройств
- Разработка схем цифровых устройств
- Современные датчики положения
- Современные сетевые технологии
- Современные системы видеонаблюдения
- Телекоммуникационные системы в гостиницах
2026 © www.informaticspoint.ru