Informatics Point
Информатика и проектирование
Описание и принцип работы разрабатываемой системы
![]()
![]() (9)
(9)
![]()
![]() (10)
(10)
![]()
![]() (11)
(11)
![]()
![]() (12)
(12)
Получили уравнение движения:
![]()
![]() (13)
(13)
Смоделируем в среде MathCad, методом Рунге-Кутта 4 порядка:
При заданной силе ![]()
![]() получили следующие зависимости:
получили следующие зависимости:
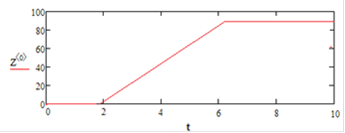
Рис.2.2.3. Зависимость угла поворота от времени
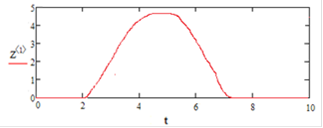
Рис.2.2.4. Зависимость скорости от времени
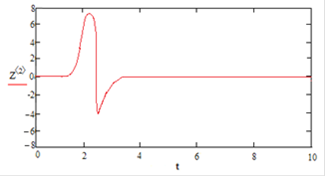
Рис.2.2.5. Зависимость ускорения от времен
В ходе моделирования мы получили , что в течении 4 секунд реабилитационное устройство повернется на 90 градусов, максимальная скорость при этому будет составлять 4.8 м/c. Исследуемые зависимости полностью удовлетворяют техническим характеристикам разрабатываемого реабилитационного устройства.
Описание конструкции устройства
Устройство предназначено для реабилитации кистевого сустава. Преимущественная цель - вернуть полный диапазон движений лучезапястного сустава, улучшить баланс сустава, достичь полной реабилитации.
Устройство состоит из нескольких частей. Манжета, сделанная из эластичного материала, одевается на ладонь и закрепляется с помощью ремней и застежек, плотно обхватывая ладонь. Вторая манжета жестко закрепляется на предплечье. Поворотное движение кисти осуществляет гидроцилиндр, на котором установлены предохранительные датчики, для предотвращения травм у пациентов.
Реабилитационное устройство работает таким образом, что гидроцилиндр прикладывает усилие необходимое для сгибания лучезапястного сустава пациента.
Устройство может работать в режиме-Сгибание с нагрузкой.
Устройство с помощью датчиков контролирует усилия, создаваемые в суставе и прикладывает необходимое «противоусилие».
Расчет гидроцилиндра
Найдем давление создаваемое цилиндром. Для этого составим уравнение моментов относительно точки шарнирного закрепления:
![]()
![]()
где ![]()
![]() полезная нагрузка, приложенная к штоку, Н;
полезная нагрузка, приложенная к штоку, Н;
Лучшие статьи по информатике
Разработка устройства для измерения радиационного излучения
Ионизирующее
излучение, часто называемое радиоактивным излучением, ―
это естественное явление, всегда присутствующее в окружающей нас природной
...
Техническое обслуживание и ремонт Автомагнитолы JVC
Ни один автолюбитель не откажется от поездки в авто под хорошую
музыку. Современный водитель покупает автомагнитолу не в качества
доп ...
Проектирование радиоприемного устройства
радиосигнал приемник частота демодулятор
Радиоприемное устройство - одно из важнейших и необходимых
элементов любой радиотехнической системы передачи сооб ...
Меню сайта
- Главная
- Проектирование современных устройств
- Разработка схем цифровых устройств
- Современные датчики положения
- Современные сетевые технологии
- Современные системы видеонаблюдения
- Телекоммуникационные системы в гостиницах
2026 © www.informaticspoint.ru