Informatics Point
Информатика и проектирование
Определение курсов, на которых скоростная девиация ГК превышает целое число градусов
Определим курсы на которых скоростная девиация составит 1°, 2° т.д. Для этого из (2.1) выразим значение косинуса ГКК:
![]()
![]()
![]()
Таким образом, получим формулу (2.2) и подставим значения девиаций в 1°, 2°, получим:
![]()
![]()
![]()
Нам известно, что максимальное значение скоростной девиации при ГКК=0° составляет получим значения курсов:
ГКК1![]() = 109°27,6'; ГКК2°= 131°39';
= 109°27,6'; ГКК2°= 131°39';
ГКК3°= 174°52,2';
Однако, исходя из теории возникновения скоростной девиации, нам известно, что абсолютные целочисленные значения скоростной девиации мы будем иметь еще на 3 курсах.
Таким образом, мы нашли значения только для одной четверти из окружности описывающей все множество курсов.
Для нахождения скоростной девиации на курсах от 0° до 360° с шагом в 0,1° составим программу и, с ее помощью, рассчитаем значения скоростных девиаций.
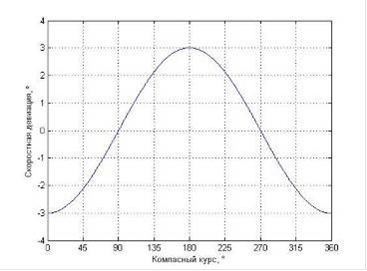
Рисунок 2.1 - График изменения скоростной девиации
Соответственно, на рисунке 2.2 приведем этот же график зависимости в полярной системе координат.
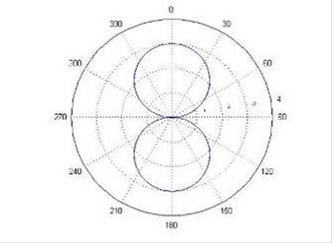
Рисунок 2.2 График изменения скоростной девиации
Точность показаний гирокомпаса несколько выше, чем у магнитного компаса, особенно на качке. Главное же преимущество гирокомпаса в том, что его поправка в процессе эксплуатации более стабильна, чем девиация магнитного компаса. Надежность работы гирокомпаса как сложного электромеханического устройства во многом зависит от уровня технического обслуживания. В процессе эксплуатации у гирокомпаса могут возникать различные неисправности, вследствие которых иногда показания его становятся ошибочными. Обнаружить подобные неисправности обычно нелегко, поэтому необходимо систематически определять поправку ГК и производить сличение показаний гирокомпаса с магнитным компасом.
Лучшие статьи по информатике
Структура металл-диэлектрик-полупроводник
В
МДП-транзисторе с поликремниевым затвором n-типа
нужно рассчитать пороговое напряжение и построить диаграмму зависимости
порогового
Напряжения
от кон ...
Разработка управляющей программы для микроконтроллера HCS12
Около
55% проданных в мире процессоров приходится на 8ми битные микроконтроллеры.
Более 4 млрд. 8ми битных микроконтроллеров продано в 2006. Они установлены ...
Проектирование коммутационной системы узловой АТС
Цель
Разработка и настройка местной телефонной сети для узловой АТС.
1 Сформировать данные заказчика для проектирования сети связи.
2 Пр ...
Меню сайта
- Главная
- Проектирование современных устройств
- Разработка схем цифровых устройств
- Современные датчики положения
- Современные сетевые технологии
- Современные системы видеонаблюдения
- Телекоммуникационные системы в гостиницах
2026 © www.informaticspoint.ru