Informatics Point
Информатика и проектирование
Разработка микропрограммы выполнения макрооперации
Микропрограмма составляется на конкретную функциональную схему, когда определён перечень регистров, триггеров, сумматоров, логических узлов. Под микрооперацией понимается действие, выполняемое за один такт под действием управляющего сигнала, например, элементарные действия на регистрах (сброс регистра, параллельное занесение информации и др.).
Предполагается, что управляющий блок уже спроектирован и выдаёт в определённые моменты времени управляющие сигналы Y-(Y1,Y2, .,Yn).
Анализ переполнения разрядной сетки осуществляется перед левым сдвигом (умножение на 2) и после выполнения алгебраического сложения. Для определения переполнения перед левым сдвигом достаточно проанализировать результат сложения по модулю 2 значений разрядов 7 и 6 того регистра, над содержимым которого производится левый сдвиг. В упрощённой функциональной схеме необходимо поставить узел, реализующий функцию
![]()
Для проверки переполнения после алгебраического сложения возможны два подхода. Первый подход: анализ переполнения производится по единице переноса в знаковый разряд и из знакового разряда. Возможны четыре случая, они представлены в таблице 1.1.
Таблица 1.1
|
единица переноса |
переполнение | |
|
из знакового разряда |
в знакового разряда | |
|
0 |
0 |
0 |
|
0 |
1 |
1 |
|
1 |
0 |
1 |
|
1 |
1 |
0 |
Второй подход: анализ переполнения производится как при левом сдвиге, но для знака числа используются два разряда. Другими словами, применяются модифицированные коды. В этом случае логический узел будет реализовывать логическую функцию:
![]()
Для этой цели в сумматоре и РСМ предусматривается девять разрядов.
Микропрограмма выполнения исходной макрооперации представлена на рис.1.6.
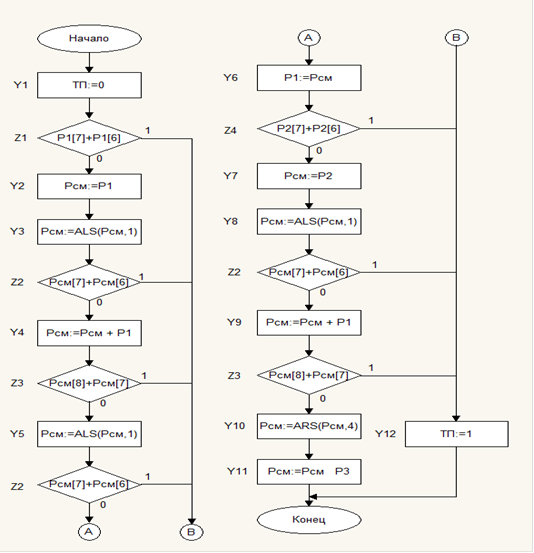
Рис.1.6. Алгоритм выполнения макрооперации
Алгоритм программы
Перечень управляющих сигналов для каждого функционального узла СВУ:
Сигналы управления
Рсм: Y2: Рсм:= Р1
Y3: Рсм:= ALS(Рсм,1)
Y4: Рсм:= Рсм + Р1
Y5: Рсм:= ALS(Рсм,1)
Y7: Рсм:= Р2
Y8: Рсм:= ALS(Рсм,1)
Y9: Рсм:= Рсм + Р1
Y10: Рсм:= ALS(Рсм,4)
Y11: Рсм:=РсмvР3
Р1: Y6: Р1:= Рсм
Сигналы осведомления
:= Р1[7]ÅР1[6]:= Рсм[8]ÅРсм[7]:= Рсм[7]ÅРсм[6]:= Р2[7]ÅР2[6]
Сигналы переполнения
ТП: Y1: ТП:= 0: ТП:= 1
Расставив управляющие сигналы на упрощённой функциональной схеме СВУ и введя дополнительные логические элементы для получения Z, получаем вариант функциональной схемы, изображённый на рис.1.7.
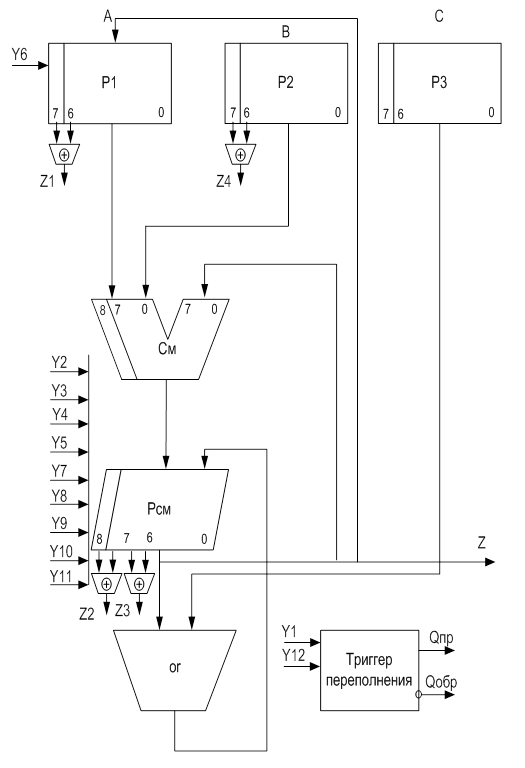
Рис.1.7 Упрощённая функциональная схема с управляющими сигналами
Лучшие статьи по информатике
Проектирование цифровых каналов передачи
Непрерывный и всё ускоряющийся рост материального производства, прогресс
в области науки техники, создание координационных и вычислительных центров и
всё во ...
Применение цифровых фотокамер для осуществления регулярной видеосъемки в образовательных учреждениях
цифровая фотокамера видеосъёмка
Современная
жизнь диктует новые требования к качеству изобразительного контента. Если в
1980-90 е года черно-белая картинка с ...
Расчет дешифратора
Проектирование и разработка базовых электронных схем и создаваемых из них
более сложных систем как раз и составляют то, чем занимается электроника.
Среди близ ...
Меню сайта
- Главная
- Проектирование современных устройств
- Разработка схем цифровых устройств
- Современные датчики положения
- Современные сетевые технологии
- Современные системы видеонаблюдения
- Телекоммуникационные системы в гостиницах
2026 © www.informaticspoint.ru