Informatics Point
Информатика и проектирование
Расчет передаточной функции ПИ-регулятора. Синтез желаемой ЛАФЧХ
Построение ЛАФЧХ разомкнутой САУ исходит из следствия теории линейных систем заключающегося в том, что если ЛАЧХ разомкнутой системы имеет в области существенных частот (в секторе, отсекаемом линиями ![]()
![]() ) наклон
) наклон ![]()
![]() , то:
, то:
1) Замкнутая САУ устойчива;
2) Переходная функция близка к монотонной;
3) Время регулирования ![]()
![]() .
.
Структура разомкнутой исходной систему с ПИ-регулятором:
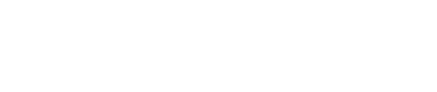
Желаемый ЛАЧХ (Lж) простейшего вида разомкнутой САУ, которая бы в замкнутом виде удовлетворяла заданным показателям качества должна иметь в окрестности существенных частот наклон ЛАЧХ равный - 20дб/дек и пересечение с осью частот при
![]()
В области низкочастотной асимптоты, для создания нулей статической ошибки δст=0 частотные характеристики разомкнутой системы должны соответствовать интегратору по крайней мере первого порядка. Тогда естественно сформировать в этой области желаемый ЛАЧХ в виде прямой с наклоном - 20дб/дек. как продолжение Lж из области существенных частот. С целью упрощения реализации САУ высокочастотная асимптота должна соответствовать высокочастотной асимптоте неизменяемой части системы
Согласно принятой структуре промышленной САУ, единственным средством приведения ЛАФЧХ неизменяемой части Lнч к Lж является
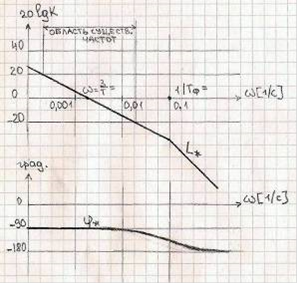
ПИ-регулятор с передаточной функцией
![]()
![]() ,
,
ЛАФЧХ (при Kp=1) которого показаны на рисунке:
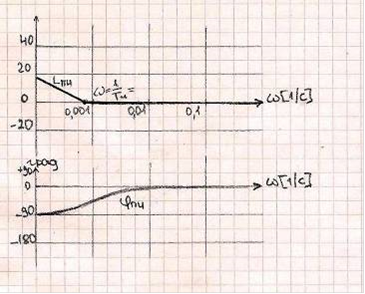
Примем постоянную интегрирования регулятора равной постоянной времени Tобъекта управления, т.е. ![]()
![]() , при Kp=1. Тогда ЛАЧХ разомкнутой САУ примет вид L1=Lнч+Lпи, качественно соответствующий виду Lжна рисунке, но с меньшим коэффициентом усиления. Для совпадения ЛАЧХ проектируемой системы с Lж необходимо увеличить коэффициент усиления разомкнутой системы на 20 дб, т.е. в 10 раз. Следовательно
, при Kp=1. Тогда ЛАЧХ разомкнутой САУ примет вид L1=Lнч+Lпи, качественно соответствующий виду Lжна рисунке, но с меньшим коэффициентом усиления. Для совпадения ЛАЧХ проектируемой системы с Lж необходимо увеличить коэффициент усиления разомкнутой системы на 20 дб, т.е. в 10 раз. Следовательно ![]()
![]() . Настройки регулятора определены.
. Настройки регулятора определены.
При ![]()
![]() , передаточная функция разомкнутой системы имеет вид
, передаточная функция разомкнутой системы имеет вид![]()
![]() , в состав которой имеет место интегрирующее звено. При построении ЛАЧХ, соответствующей Wp (p) коэффициент передачи
, в состав которой имеет место интегрирующее звено. При построении ЛАЧХ, соответствующей Wp (p) коэффициент передачи ![]()
![]() 0.29/1589 должен численно соответствовать частоте пересечения ЛАЧХ с осью
0.29/1589 должен численно соответствовать частоте пересечения ЛАЧХ с осью ![]()
![]() на частоте
на частоте ![]()
![]() , откуда
, откуда ![]()
![]() или
или ![]()
![]() .
.
Лучшие статьи по информатике
Схемотехника параметрических, линейных и импульсных стабилизаторов напряжения постоянного тока
Для выполнения курсовой работы были выбраны две схемы источников
вторичного электропитания с линейным и импульсным регулированием.
Импульсное регулировани ...
Электронавигационные приборы
На каждом судне для следования по намеченному курсу, выбора пути
следования, контроля местонахождения в открытом море с учетом изменяющейся
навигационной и ...
Технология TriplePlay
Сегодня
во множестве источников можно узнать, что мировая телекоммуникационная отрасль
находится в состоянии грандиозной реконструкции, связанной с конверге ...
Меню сайта
- Главная
- Проектирование современных устройств
- Разработка схем цифровых устройств
- Современные датчики положения
- Современные сетевые технологии
- Современные системы видеонаблюдения
- Телекоммуникационные системы в гостиницах
2026 © www.informaticspoint.ru