Informatics Point
Информатика и проектирование
Построение функциональной электрической схемы блока управления
Сигналы, поступающие с датчиков, как правило, являются импульсными, то есть имеют малую продолжительность, а исполнительные устройства должны работать продолжительное время, поэтому сигналы датчиков необходимо преобразовывать с помощью запоминающих элементов, формирующих управляющие сигналы. Поэтому, для построения функциональной электрической схемы блока управления используем триггеры.
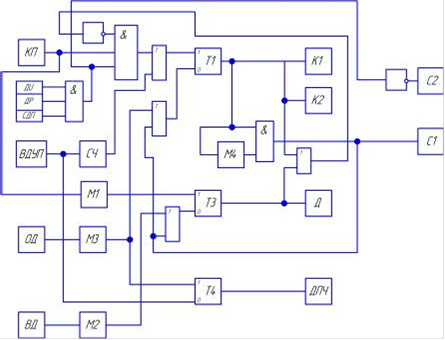
Рис. 2 Блок управления для сварки линейного шва (схема по фазам технологического цикла)
После команды "Пуск" при помощи датчиков ДU, ДP и CДП проверяется напряжение питания источника, давление в системе подачи углекислого газа и наличие электродной проволоки. При неисправности на выходе элемента & возникает логический "0" и с помощью инвертора и усилителя УС1 запускает сигнализацию С1. При отсутствии неисправностей логическая "1" с выхода &1 поступает на вход &2, на одном из входов которого реализована защита от повторного нажатия кнопки "Пуск". Далее сигнал поступает на триггер Т1 и включаются клапаны К1 и К2. Затем по истечении времени на счетчике М1 включается двигатель Д при помощи триггера Т3, при наличии неисправности включает сигнализация С2. При отсутствии неисправности после срабатывания датчика ВД производится отсчет времени на счетчике М2 и при помощи триггера Т3 отключается двигатель Д. После срабатывания датчика ОД производится отсчет времени на счетчике М3, по истечении которого подается сигнал на триггер Т1 и отключаются клапаны К1 и К2 и через триггер Т4 включается двигатель ДПИ и отключается после срабатывания датчик ДУП и подается сигнал на счетчик СЧ, после чего цикл запускается снова, пока значение на счетчике не будет равно двум.
. Построение алгоритма работы блока управления.
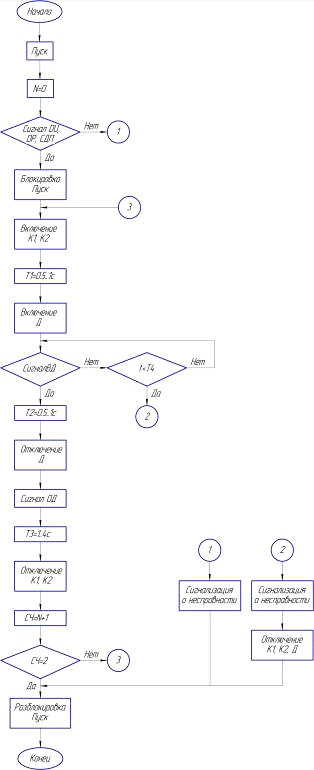
Рис. 3. Алгоритм работы блока управления
. Программа на языке FBD в среде CODESYS.
Переменные.
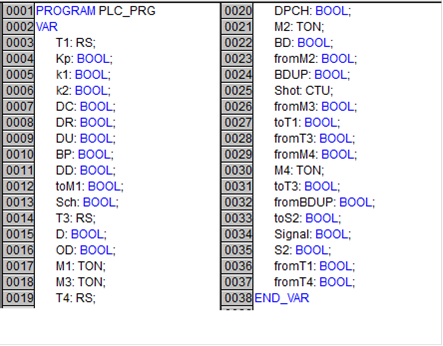
Рис. 4 Описание переменных.
Приведенные выше переменные описываются в блоке POU PLC_PRG и используются в качестве вспомогательных переменных. Входные и выходные переменные описываются в разделе глобальных переменных. Входные: Kp, OD, BD, BDUP. Выходные: k1, k2, D, DPCH. Все переменные в блоке глобальных переменных принадлежат к типу BOOL.
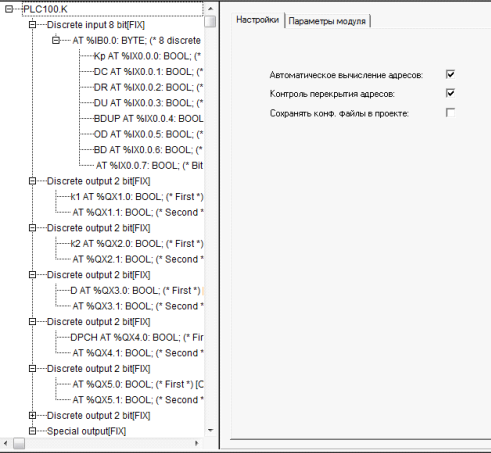
Рис. 5 Конфигурирование ПЛК.
PLC_PRG (PRG).
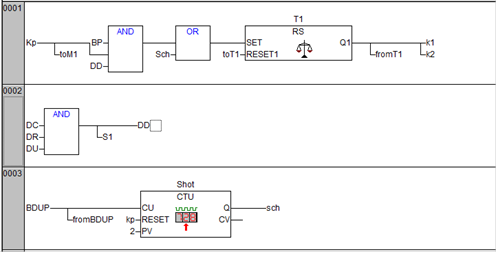
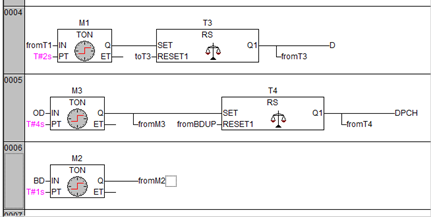

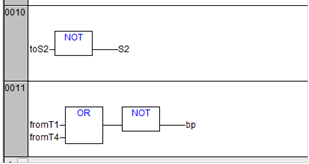
Рис. 6. Листинг программы на языке FBD.
В первой цепочке реализованы пуск программы, блокировка повторного нажатия и управления исполнительными клапанами К1 и К2 через триггер Т1. Во второй цепочке реализована проверка наличия неисправностей и сигнализация при их обнаружении. В третьей цепочке реализована работа счетчика. Далее в 4-й цепочке идет управление двигателем Д, через триггер Т3, управляющий сигнал поступает с таймер-счетчика М1. В 5-й цепочке реализовано управление двигателем ДПИ при помощи триггера Т4, управляющий сигнал приходит с датчика ОД на таймер счетчик М3 и далее на RS-триггер. В шестой цепочке сигнал с датчика ВД поступает на счетчик М2 и с него управляющий сигнал присваивается переменной FromM2. В остальных цепочках реализованы вспомогательные узлы и операции.
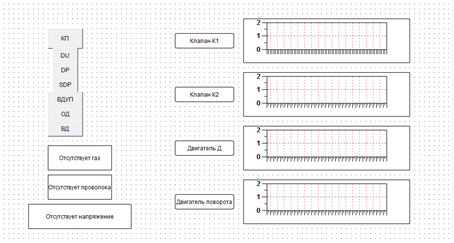
Рис. 7 Окно визуализации.
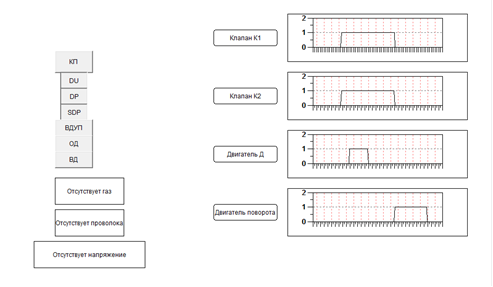
Рис. 8 Окно визуализации в режиме эмуляции.
Входит в standard. lib.
Переключатель с доминантой выключения:= RS (SET, RESET1) means:
Q1 = NOT RESET1 AND (Q1 OR SET)
Входные переменные SET и RESET1 - как и выходная переменная Q1 типа BOOL.
Пример объявления:: RS;
Пример IL:
CAL RSInst (SET: = VarBOOL1,RESET1: =VarBOOL2)RSInst. Q1VarBOOL3
Пример ST:(SET: = VarBOOL1, RESET1: =VarBOOL2);: = RSInst. Q1;
TON
Входит в standard. lib.
Функциональный блок 'таймер с задержкой включения'.(IN, PT, Q, ET) Входы IN и PT типов BOOL и TIME соответственно. Выходы Q и ET аналогично типов BOOL и TIME.
Пока IN равен FALSE, выход Q = FALSE, выход ET = 0. Как только IN становится TRUE, начинается отсчет времени (в миллисекундах) на выходе ET до значения, равного PT. Далее счетчик не увеличивается. Q равен TRUE, когда IN равен TRUE и ET равен PT, иначе FALSE. Таким образом, выход Q устанавливается с задержкой PT от фронта входа IN.
Лучшие статьи по информатике
Частотно-территориальное планирование сети сотовой подвижной связи стандарта GSM
Линии радиосвязи, входящие в состав сотовых сухопутных подвижных систем
электросвязи (ССПСЭ) и спутниковых систем связи, обычно работают в диапазонах
ультра ...
Разработка сети передачи данных Нуринского РУТ Карагандинской области на основе создания цифровых РРЛ
Оцифрованные
магистрали, на базе которых строятся современные сети передачи информации,
должны быть стандарта SDH (Synchronous Digital Hierarchy -это синхро ...
Техническое обслуживание и ремонт Автомагнитолы JVC
Ни один автолюбитель не откажется от поездки в авто под хорошую
музыку. Современный водитель покупает автомагнитолу не в качества
доп ...
Меню сайта
- Главная
- Проектирование современных устройств
- Разработка схем цифровых устройств
- Современные датчики положения
- Современные сетевые технологии
- Современные системы видеонаблюдения
- Телекоммуникационные системы в гостиницах
2026 © www.informaticspoint.ru