Informatics Point
Информатика и проектирование
Моделирование системы автоматического управления средствами MATLAB
Исследование непрерывной системы
Проведём моделирование системы автоматического управления средствами программного пакета MATLAB. Воспользуемся расширением данного программного продукта - средой моделирования Simulink.
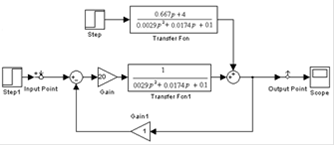
Рис.3.2.1.Модель системы автоматического управления в среде Simulink
Используя встроенные средства среды Simulink, получим график переходного процесса системы, при воздействии на неё единичного ступенчатого сигнала (рис. 3.2.1).
Из графика можем определить следующие параметры система автоматического управления:
· время переходного процесса - 0.00439 с;
· колебательность присутствует;
· коэффициент перерегулирования - 48,6%;
· Величина статической ошибки - 0%.
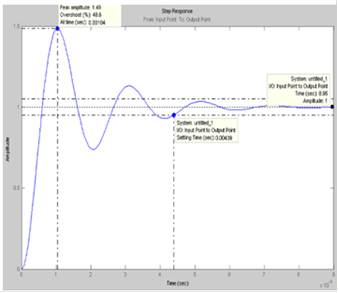
Рис. 3.2.2. График переходного процесса системы при воздействии на неё единичного ступенчатого сигнала
Исходя из этих данных, можно сделать вывод о том, что система автоматического управления не соответствует техническому заданию и нуждается в корректировке. В качестве корректирующего звена выберем ПИД регулятор.
Настройка ПИД регулятора
Для настройки ПИД регулятора - определения значений пропорционального, интегрального и дифференциального коэффициентов - воспользуемся встроенными средствами среды Simulink.
Подбор коэффициентов будем осуществлять с помощью блока NCD OutPort. Включим его в схему, как показано на рисунке 5.2.1.
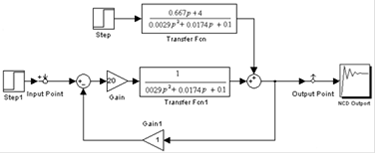
Рис.3.2.3 Схема, собранная для настройки ПИД-регулятора
Зададим настройки NCD блока и ПИД регулятора.

Рис. 3.2.4. Настройки блока NCD OutPort

Рис. 3.2.5. Настройки блока NCD OutPort

Рис. 3.2.6. Параметры ПИД регулятора PID Controller
Значения коэффициентов, полученных оптимизацией в NCD блоке :
Kp = 1.5494= 1.6008= 0.7505
После корректировки переходная функция удовлетворяет техническому заданию.
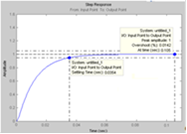
Рис.3.2.7. График переходного процесса системы при воздействии на неё единичного ступенчатого сигнала
Получены следующие характеристики:
Время переходного процесса - 0.0354 с.
Колебательность отсутствует
Коэффициент перерегулирования - 0.
Ошибка - 0.
Определение передаточных функций разомкнутой и замкнутой системы.
Определим передаточную функцию разомкнутой системы:
Определим передаточную функцию замкнутой системы:
![]()
Характеристическое уравнение замкнутой системы имеет вид:

![]()
Моделирование цифровой системы.
Для исследования ЦСАУ необходимо провести z-преобразование передаточной функции непрерывной системы. Для этого воспользуемся средствами математического пакета VisSim .

Рис. 3.2.8. Переход в Z-пространство средствами VisSim.
После того как было проведено Z-преобразование, соберём схему и исследуем вид переходных характеристик.
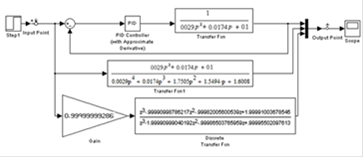
Рис.3.2.9. Схема для исследования замкнутой системы
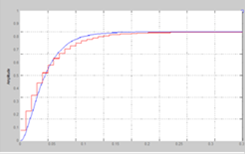
Рис.3.2.10.Результат дискретизации.
Лучшие статьи по информатике
Построение и анализ математической модели объекта управления
Построим математическую модель объекта управления в пространстве
состояния
Рисунок 2 Структурная схема ОУ
В схеме четыре элемента, запасающих э ...
Разработка системы автоматизации теплового пункта
Задача
повышения энергоэффективности имеет особый характер, т.к. поставлена на высшем
политическом уровне и касается всей экономики РФ.
Основополагающими
до ...
Электромагнитная совместимость средств связи
Исходные данные для прогнозирования ЭМС
Мощность передатчика РРЛ, Вт;
Частота сигнала передатчика РРЛ, МГц;
Высота установки антенны передатчика РР ...
Меню сайта
- Главная
- Проектирование современных устройств
- Разработка схем цифровых устройств
- Современные датчики положения
- Современные сетевые технологии
- Современные системы видеонаблюдения
- Телекоммуникационные системы в гостиницах
2026 © www.informaticspoint.ru